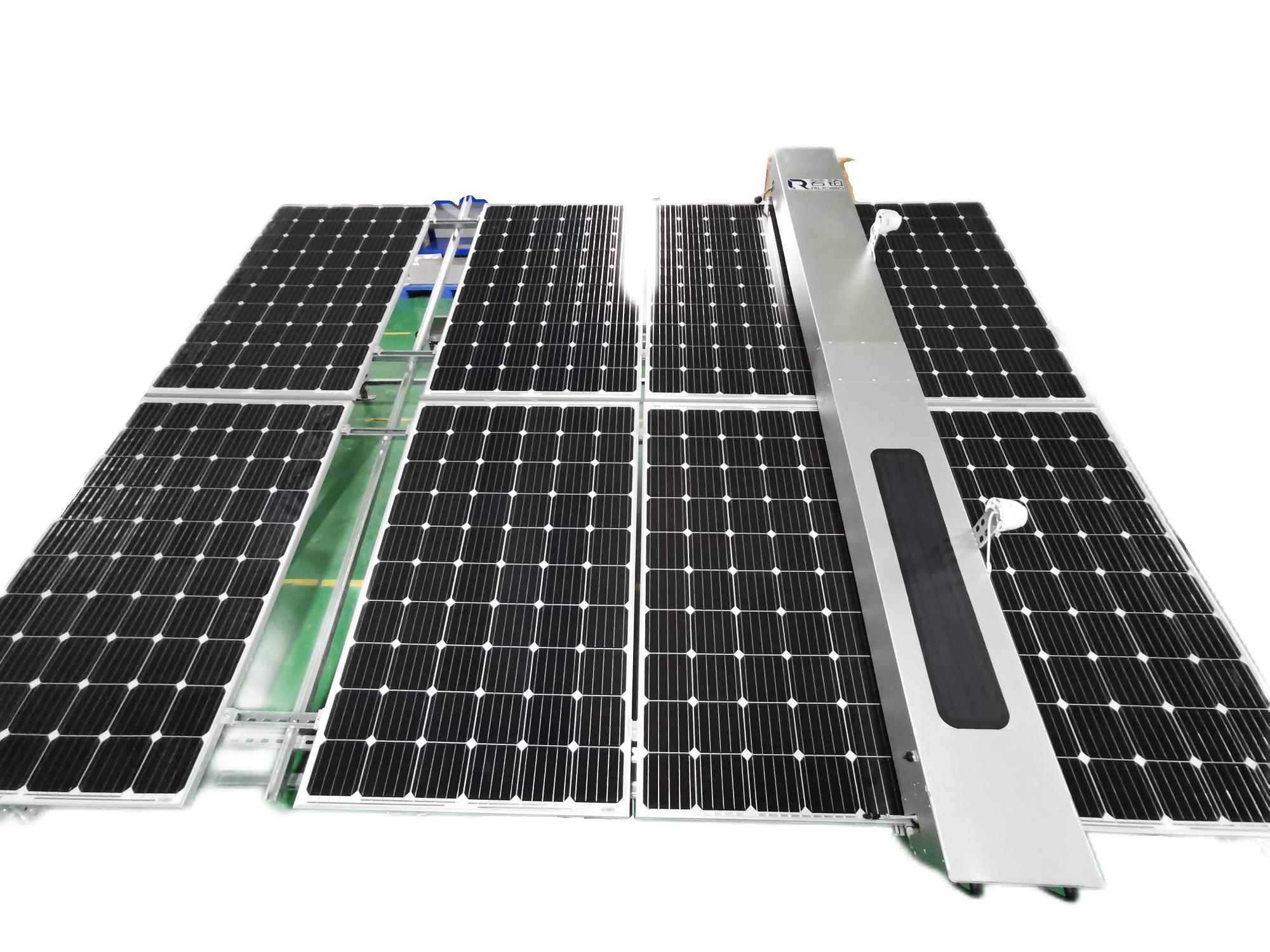



果实精准采收。双目立体视觉精准判别可采摘番茄的成熟度和采摘位置定位;轻巧型多自由度机械臂,轻松完成路径规划、采摘和放篮多个任务;柔性采摘手通过自适应控制完成番茄采摘位置抓取,不伤果;按照作物商品性特点,采用按个、按串或收包装一体化等多种采收方式。
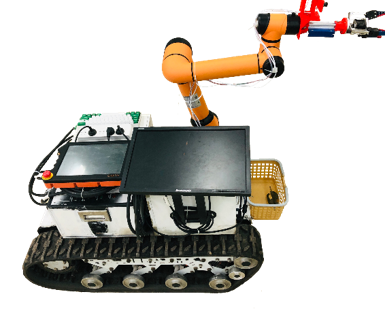
针对农业地形和材质的多样性,通过履带式行走系统满足不同场景要求;结合场景的特点,针对性地设计导航方案并搭载视觉传感器完成导航;辅以动力匹配、结构优化,轻松完成爬坡越障。
3) 农机农艺融合新模式
围绕选择性收获,结合作物品种,栽培模式和机器人的交互方式,构建针对作物的智慧栽培系统。
标配型:现代农业园区或科技农业园区、标准化温室种植、农业培训类机构、农业嘉年华类活动。